UgCSは、既にDJI Matrice 400及びDJI Zenmuse L3に対応しておりますので、特殊な操作は必要なく通常にミッションを作成することが出来ます。
詳細は以下になります。
- UgCS を最新バージョンにアップデートします。SPH Engineeringより最新バージョンをダウンロードしてください。
- Create new mission
 にて、Create from scratchを選択し、任意名称のRoute nameを入力し、Next後、Matrice400(初めての場合は下の方にあります)を選択します。
にて、Create from scratchを選択し、任意名称のRoute nameを入力し、Next後、Matrice400(初めての場合は下の方にあります)を選択します。
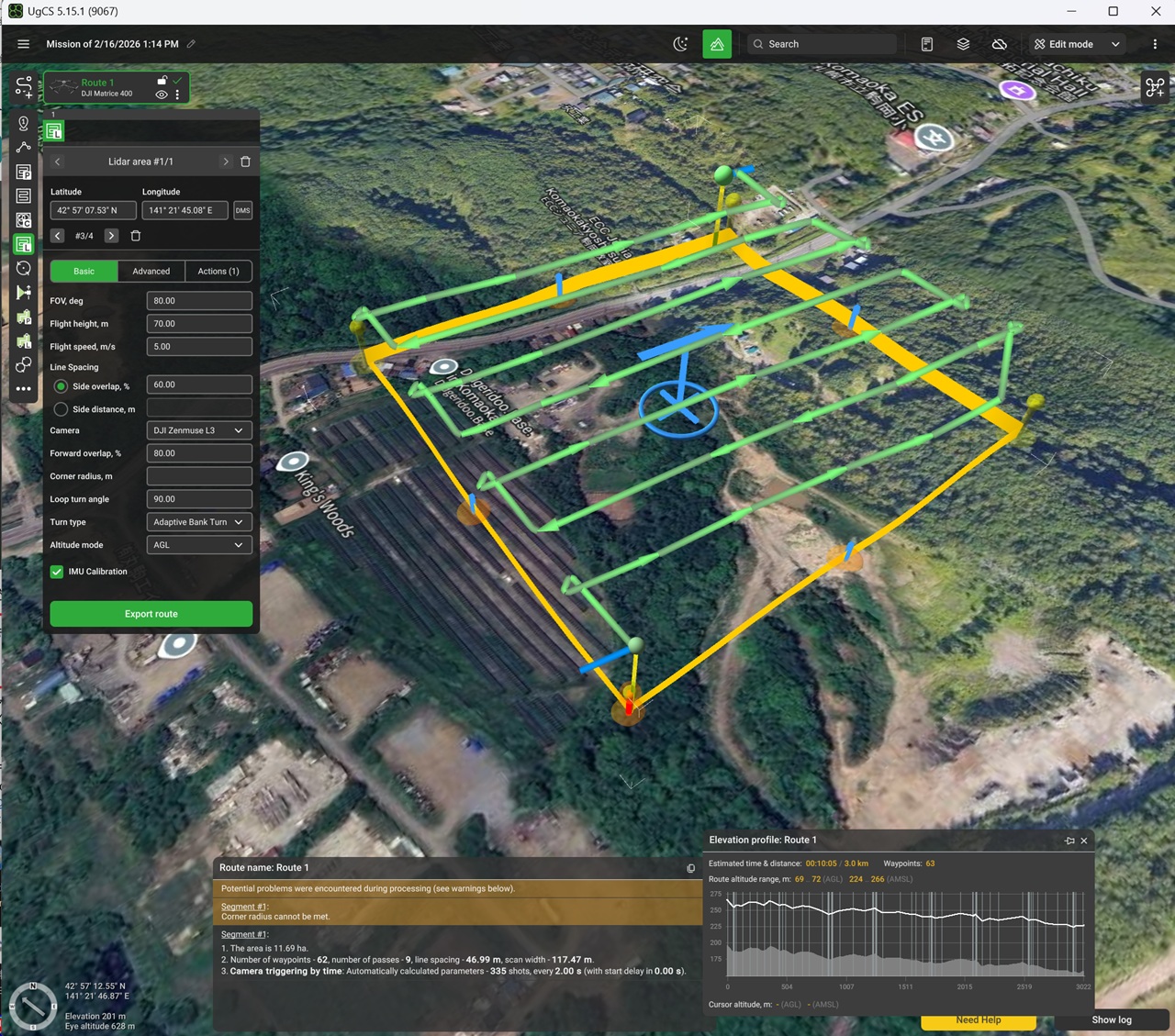
- Choose route typeにて、「LiDAR」→「Area」などを選択します。
- Camera Typeにて「DJI Zenmuse L3」を選択します。
- 着色が必要な場合、「Actions」タブにて、「Set Camera by time」などを設定します。UgCSのメッセージは、「Set Camera by time」とメッセージが表示されますが、DJI PilotではIntervalで設定されるため、どちらでもよいかと思います。
- 必要に応じて、L3のFOVの値を見直してください。L3 LiDARのFOVは80°です。
- IMUキャリブレーションは、チェックを入れて置く事で自動(青線部分)で挿入されます。(便利になりました)
- Turn typeを「Adaptive Bank Turn」に設定し、「Loop turn angle」を90°以上にすることで、各ターンにループが入れることが可能です。IMUの誤差蓄積を削減することが出来ますので、ループターンを推奨します。
LiDARもしくはスマートAGLを使用する場合は、EXPERTライセンスが必要になります。
以上です。