UgCSとは
UgCSとは、ラトビア共和国(北ヨーロッパ)のSPH Engineering社が開発した次世代Ground Stationソフトウエアです。従来のGround Stationは、Googleマップを利用し平面図(TopView)を参照しての飛行設定でしたが、UgCSはGoogleアースライクな立体図を参照し、土地の起伏を確認しながら、飛行設定を行う事が可能です。本記事では、こんなことができるんだという紹介を兼ねて使用方法や設定例を記載します。
レーザやUAV測量を行う上での従来Ground Stationの問題
ある程度広い場所でのUAV測量やオルソ撮影を経験されている方は、ご存知だと思いますが、撮影領域を分割する場合、従来のGround Stationでは問題がありました。従来は、飛行高度の設定は離陸地点からの高度であるため、離陸地点が起伏によって標高が変化すると、結果飛行高度も変わってしまい、分割前後の写真は点群データが生成出来なく(繋がらなく)なってしまいます。高度が変わると対象物の大きさが変わってしまうため、前後の写真の共通点が見いだせなくなるからです。
また、10~20キロ程度の長い河川の撮影も同様の問題があります。現在のGround Stationソフトウエアは、1.5km前後が一度に飛行出来る最大距離の為、長い河川を撮影する場合は、分割が必要になります。河川は上流から下流に向かって少しずつ下降していくため、分割前後では離陸地点の標高が変わるため、前後の写真の点群合成が出来なくなる場合があります。分割前後の離陸地点の標高差を確認し、初期の設定高度に差分を足されている方もいらっしゃるかと思います。
特に、レーザを行っている会社様は、未開発地域での測量が多いため、山、谷の起伏が激しい場所を撮影します。このような場所でレーザを搭載できる大型のドローンを飛行させるのは、かなり大変だという声を聞きます。
UgCSの優れた機能
前置きが長くなりましたが、UgCSの機能の一部をご紹介します。前述した内容が今現場が抱えている一番の問題だと考えておりますので、その部分に特化した内容のご紹介になります。
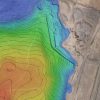
下図は、敢えて起伏の大きい所をUAV測量用に撮影する飛行経路の図です。まずは、イメージとして見てください。緑の線は飛行パス、地面上の四角い黄色は、指定した飛行領域、飛行パスと飛行領域間の縦の薄黄色パスは、Waypointを示しています。
![]()
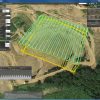
下図は、上図をそのまま下に目線を落とした図になります。詳細は、後述しますが、飛行高度は一定高度を飛行し、かつGSDやオーバラップ率を満たす飛行計画です。エリアを指定することで自動的に計算してくれます。上図と合わせて見てください。
![]()
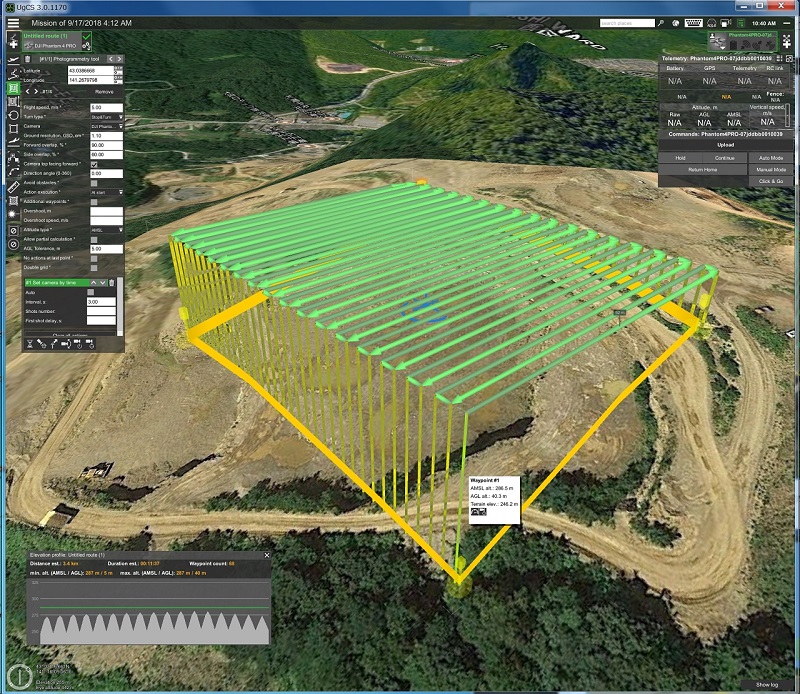
下図は、設定や結果の表示ウィンドウになります。向かって左側のウィンドウから順に
- ビークルの種類
- フライトスピード
- GSD(地上分解能)、前後オーバラップ率、サイドオーバラップ率
- 撮影領域内の飛行する方向
- 高度タイプ:AMSL(平均海面高)、AGL(対地高度)の選択
- 地面とのトレランス(余裕高度)
- カメラの設定
- 飛行距離、飛行時間、waypoint数、AMSL、AGLでの最少高度、最大高度
- ルートの概要
となり、従来のGround Stationと同じパラメータが存在します。
![]()
この例では、ファントム4Proを指定し、オーバラップ率90%、サイドラップ率60%、GSD1.1を指定しています。結果設定された飛行ルートは、飛行距離3.4km、飛行時間11分37秒、waypoint数68個、AMSL(平均海面高)は287m一定であり、AGL(対地高度)は最小部で5m、最大で40mという結果になっています。
ちなみに、当初はGSD1.0を指定しましたが、飛行ルートの計算の結果、標高の一番高い部分において、UAVのAGLが5m以下となるため、安全上GSD=1.08以上にしなさいというメッセージが出ました。その為、GSD=1.1にて再度ルート計算した結果になります。
このように、諸所の設定パラメータと起伏を踏まえてツールが自動的に計算してくれます。起伏差の大きいところは、一眼カメラやInspire等のレンズが交換できるものでは、焦点距離の長いレンズを使用する事で対応できる起伏差やGSDに余裕度大きくなります。
更に下図は、GSD=1.0、オーバラップ率は同じで、地形に沿った飛行プランになります。上図の説明 eをAMSLからAGLに変更したのみになります。UAV測量には向いていない飛行プランかもしれませんが、調査、捜索、遺跡跡、景観などの撮影には向いていると思います。
![]()
機能の全体概要、ライセンス種類、見積もり等に関しては、UgCSライセンス販売をご確認ください。
以上です。