
ハンドヘルド型のSLAM LiDARであるSHARE S10 の検証レポートです。
S10の概要
S10の仕様はリンク先をご確認ください。
S10は、専用のアプリPointcloud Captureをスマートフォンにインストールし、そのアプリで設定や操作、リアルタイムに点群取得状況を見る事が出来ます。アプリは、iOS版とAndroidの両方対応しています。
S10には、RTKとGCPの補正モードが備わっており、上空が開けているところではRTK補正、屋内などではGCPで補正することが出来ます。現在(2024.10.23時点)は、RTKのみが使用出来ますが、今後ソフトウエアのアップデートによりGCP機能も追加されます。
S10の電源を入れると、S10がWi-Fi基地局となり、それにスマートフォンを接続する形になります。スマートフォンに4G通信機能があれば、ジェノバなどのVRS業者と接続しネットワークRTKを使用することが出来ます。そのため、4G通信機能を持っていないスマホ、タブレットでは、RTKを使用出来ない事に注意してください。
Pointcloud Captureには、予め、RTKのマウント情報、4G接続の設定をしておきます。使用方法は以下の様に非常に簡単です。
①S10の電源を入れる。
②スマホからWi-Fiに接続する(一度接続すれば2回目以降は自動で接続される)。
③RTKのFixを確認する。
④測定開始ボタンを押す。
⑤イニシャライズ完了するまで平らな所に置いて置き、イニシャライズ完了したら手に持って歩く。
となります。アプリで状況がわかるので、操作は使いやすいと思います。下図は、Pointcloud Captureの画面です。
![]()
データ取得後は、付属するPCソフトウエアのPointclouds Studioにて、RTKによる補正を行う事が出来ます。対応している座標系は、現在はまだUTMのみですので、GISソフトウエア等で日本の座標系にデータ変換する必要があります。ちなみに、MetashapeでもUTMからJGD2011に変換することが可能です。UTMとJGD2011は、同じデータムなので、MetashapeにUTM座標系でインポートし、そのままエクスポートにてJGD2011を指定することで変換可能です。もちろん、JGD2011+Verticalを指定することで楕円体高から標高にも変換出来ます。別途ジオイドモデルの登録、設定が必要ですので、見積時、予めご連絡ください。これらのノウハウもまとめたドキュメントも付属しますので、ご検討ください。
RTK補正しない場合は、ローカル座標が適用されており、イニシャライズ場所が原点になっているようです。単位はメートルです。
SLAMの性能
これは、S10に限らない話ですが、この小さなLiDARモジュールで、どの位周りの対象物をスキャンすることが出来るのか、またRTKが使用できない環境でSLAM処理はどこまで正しくスキャン(精度よく測定)することが出来るのか、検証してみました。
森林編(Non RTK)
一般に地上レーザスキャナー(TLS)は、立木の抽出力が高く、胸高直径(DBH)を精度良く把握できますが、樹頂に点群が届きにくいため、樹高が過小評価される欠点があると言われます。ハンドヘルド型の場合、向きは変えられるので水平(S10を縦に普通にもった状態)と上方(S10を斜め手前に倒した状態)の両方を取得することは可能ですが、今回は水平状態のみの測定しています。まずは通常の使い方でどこまでの範囲をスキャン出来るかに主点を置いています。
ここでの検証の目的としては、以下の2点になります。
- 死角なく各々の木の点群を取得出来るのか?
- SRAM処理のみ(GPS/RTKを使わない)でどの位正確に測定できるのか?
測定領域としては、約50m×50m程度とし、次のような感じです(Top View)。
![]()
森林の中は、GPS受信状態が不安定であり、RTKを使用することは出来ない為、測定の経路はSLAMのセオリーに従ってループする必要がありますが、森林の広さと密度を考慮して、領域を50m×16m程度のエリアで3分割し、一つのエリアを〼経路(一筆書き)にて測定し、それを3エリア分連続して実施しました。SLAMの場合、過大といいますか、不要なオーバラップは点群の合成に悪影響を与えますが、この形だとループ条件を満足しつつ、不要なオーバラップを避け、死角を減らせる経路となります。現地の状況に応じて経路を検討するのは非常に大事な事です。
![]()
点群の取得状況は、以下の動画をご確認ください。Metashapeでアニメーションしてみました。この小さなLiDARでも胸高付近では、ほぼ死角がない点群を取得できましたが、樹頂、樹冠はやはり点群の取得が少ない状況が見えます。(ALS、他の指標でカバーする必要があります)。
SLAMの正確性に関しては、公園内にちょうどテーブルがありましたので、実寸と比較してみました。実物のサイズは、66.5×150cmに対し、点群上のサイズは、66.6×149cmでした。誤差は最大(Y方向)で0.6%程度です。
| 実測 | 点群 |
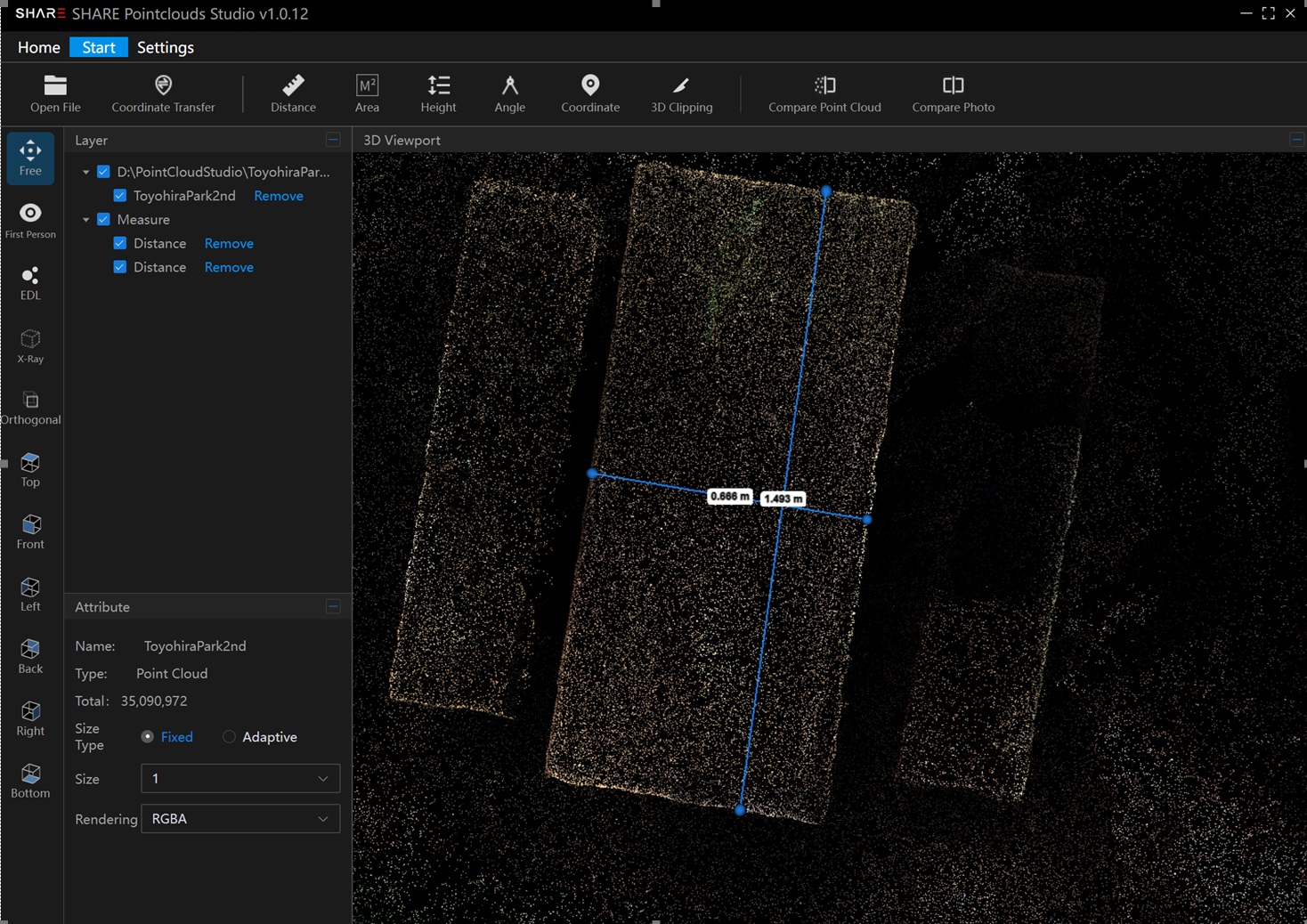 |
テニスコート編(Non RTK)
テニスコートは、地面の素材によって色々な名称があるようですが、クレーコート(地面がアスファルト)で作られたものを測定してみました。特徴点が少ないため、上手く点群になるか懸念されるような場所ですが、地面がグレー色のコートに関しては問題なく点群になりました。なぜテニスコートかと言いますと、大きさが規格で決まっているので、精度を確認するのに丁度良い材料と考えました。
![]()
これもRTKを使用せず、SLAM処理のみです。テニスコートの規格は、23.77m×10.97mです。これも、最大で0.4%程度の誤差です。SRAMによる測距技術、恐るべしです。
![]()
ちなみに、朱色のコートでも試してみましたが、正常に点群を合成出来ませんでした。朱色のコートは、雨上がり後で水たまりもあったので、これも悪い影響したのかもしれません。この時は、RTKを使ってましたが、RTKでも特徴点を見いだせないと上手くいかないようです。![]()
公園の川
これは、RTKを使用して測定しています。建物(滑り台)を中心に両サイドを1往復しています。
![]()
敢えて石垣の細部を死角なしに測定するために、2往復すると下図のように点群の合成が上手くいかない結果となりました。これは、S10というよりも、SLAMは細長い領域を測定する場合は、戻りながらの測定は推奨されませんが、それと同じ現象になったのかもしれません。SRAMの特徴を掴み経路をきちんと考慮しましょう。
![]()
測量時の誤差
RTKを使用した測量時の誤差に関しては、あまり心配していませんが、弊社ビル横の駐車場での確認は、簡易的なものですが、他の製品と同等程度の精度(ZYZ誤差5cm以内)でした。
尚、LidarSLAM 技術を用いた公共測量マニュアルでは、GNSS 測位データを用いた解析手法は対象外としており、GCPが必須となっています。
以上です。
