弊社で扱っているハンドヘルドスキャナー LiGRIP H120に関して、測量の精度検証を実施しました。また海外製品である為、日本の測量環境(RTK)でも問題なく使えるのか、も確認しました。
LidarSLAM 技術を用いた公共測量マニュアルも公開されていますので、今後普及していく測量手法だと思われます。
LiGRIPの概要
LiGRIP H120/H300は、GreenValley International(米カリフォルニア州)の製品であり、GNSS信号のない場所でも動作する SLAM*1アルゴリズムの3Dマッピングシステムです。 地形測量・マッピング、林業測量、屋内外総合測量、土工測量、ファサード測量・マッピングなどの分野で幅広く使用できます。バックパック・キットを使用することで、GNSS 信号へのアクセスをサポートし、絶対座標データを持つ点群データを直接取得することができます。RTKに対応しており、GreenValleyが独自開発したLiFuserを使用することでPPK後処理も可能です。以下の2種類のラインナップがあります
*1 SLAM(Simultaneous Localization and Mapping):レーザ点群の特徴点をマッチングして、自己位置と点群を同時に推定する技術。
| 主なSPEC | H120*2 | H300 |
| FOV | 280°×360° | 280°×360° |
| スキャンレンジ | 120m | 300m |
| スキャンレート | 320,000 pts/s | 640,000 pts/s |
| スキャン精度 | ±1cm | ±1cm |
| ビデオ解像度 | 5760×2880 | 6144×3072 |
| マッピング手法 | 制御点(GCP)、PPK後処理、RTK | 制御点(GCP)、PPK後処理、RTK |
| プラットフォーム | ハンドヘルド、バックパック 車載 |
ハンドヘルド、バックパック 車載、ドローン |
*2 H120は、2023年12月1日にモデルチェンジされ、RTK及び車載対応となった。
LiGRIPは取付けキットを使用することで、複数のプラットフォームを実現可能。
| ハンドヘルド | バックパック |
| 車載 | ドローン |
今回検証した製品とモード
LiGRIP H120を使用し、以下の2種類の方式で測量を実施。
| ハンドヘルドモード:制御点(GCP)補正 | |
| 測定の様子 | GCP登録中 |
| バックパックモード:PPK補正のみ | |
| 測定の様子 | 固定局(現場に設置する場合) |
お借りした現場
H建設様協力の元、現場をお借りし、LiGRIP H120による測量を実施。GCP(A1~A7)は下図のように配置した。尚、A1~A7の座標計測は、ネットワークRTKを使用(注:LidarSLAM 技術を用いた公共測量マニュアルでは、要求精度が5cm以内はTS 等を用いる TS 点の設置に準じて行わなければならない。)
また、同公共測量マニュアルでは、検証点は1回の計測範囲を囲むように4点以上を設置するとあるため、主の方式となるバックパックモード時は、それよりも厳しい全ての検証点(計7点)にて計測を実施した。
|
|
LiGRIP 測定と後処理
LiGRIPで測定したデータは、LiFuser-BPにて後処理を行う事ができるが、今回は制御点による補正方式と、PPKによる補正の2通りを実施。PPKに使用する補正データは、現場に固定局を設置してスタティック測位のデータを取得する必要があるが、今回は準備が間に合わず株式会社ジェノバから現場の仮想基準点の補正データを取得した。
| ハンドヘルドモード測定 | バックパックモード測定 |
| LiFuser-BPで後処理の様子 | |
今回の実験では、より精度を向上させるため仮想点による補正データを使用した。近くの電子基準点データを使用する場合、日本の電子基準点のアンテナ高は、現在では物理的なアンテナ高ではなく、アンテナ機種毎のアンテナ底面+オフセットがPCV補正されたものになっている為、そのままでは使用出来ない事もわかった。
![]()
また、下図は、標識が良く見えるケースであるが、
![]()
下図のように標識がつぶれているケースも有り、このような状態で計測すると誤差が大きくなることが分かった。標識の近くでは十分な点が取れるようにレーザがしっかり当たる様にする必要がある。また、誤差測定時は、表示モードにも注意する必要がある。
![]()
また、LiFuser-BPは日本の平面直角座標もサポートしており、lasとしてエクスポートも可能。
![]()
上記に述べたような疑問は、初めて行うお客様に共通して発生する問題と思われるため、リファレンスマニュアルなどにまとめている。
LiGRIP 精度検証結果
計測したデータをLiFuser-BPに取り込み、PPK処理及び座標系を平面直角座標系に変換し、誤差を測定。LidarSLAM 技術を用いた公共測量マニュアルの「平面直角座標系への変換の点検」は行っていないが、緯度経度から平面直角座標への変換後の座標にて誤差の計算を行いました。(LiFuser-BPは、出力座標系を指定出来るので、変換というよりも設定するのみである。)
- ハンドヘルドモードは、誤差は0.96cm~8.6cm程度。マニュアルに記載されているGCP配置と精度のガイドラインと比較してほぼ適切な範囲の誤差と思われる。
- バックパックモードは、GCP無しにて全検証点でXYZ全て5cm以内*3に入る事が確認出来た。
*3 PPK処理は現場での仮想基準を使用したが、諸事情により今回GCPの位置測定はVRS測定ではなくソフトバンクのichimillで測定であった為、その基準の違いによる誤差も含まれている。
ハンドヘルドモード測定(GCP)結果
| 点名 | 誤差 X (m) | 誤差 Y (m) | 誤差 Z (m) |
| A4(検証点) | -0.019 | 0.0185 | -0.0096 |
| A5(検証点) | -0.0358 | 0.0464 | -0.0863 |
| A6(検証点) | -0.0055 | 0.0541 | -0.0299 |
| RMS | 0.023614 | 0.042513 | 0.053022 |
バックパックモード測定(PPK)
| 点名 | 誤差 X (m) | 誤差 Y (m) | 誤差 Z (m) |
| A1 | 0.0195 | 0.0154 | -0.0479 |
| A2 | 0.0137 | 0.0196 | -0.03 |
| A3 | 0.0099 | 0.044 | -0.0164 |
| A4 | 0.032 | 0.0035 | -0.0125 |
| A5 | 0.0142 | -0.0116 | -0.0402 |
| A6 | 0.0375 | 0.0431 | -0.0338 |
| A7 | 0.0265 | -0.0384 | -0.0298 |
| RMS | 0.023905 | 0.029365 | 0.032218 |
確認/未確認 事項
- 制御点(GCP)及びPPK処理による精度確認が出来た。
- PPKに使用する仮想基準補正データ以外にも国土地理院の電子基準点補正データ(Rinex)も正常に読み込める事が確認出来た。これらの事から、LiGrip(正確には後処理を行うLiFuser-BP)は海外製品であるが、日本の測量環境下における運用も問題ないと言える(但しアンテナ高は注意)。
- GreenValley製品のLibaseを使用した固定局設置での運用は、今回確認出来なかった。もし時間があれば、ドロガーを使用しトライする予定。
考察
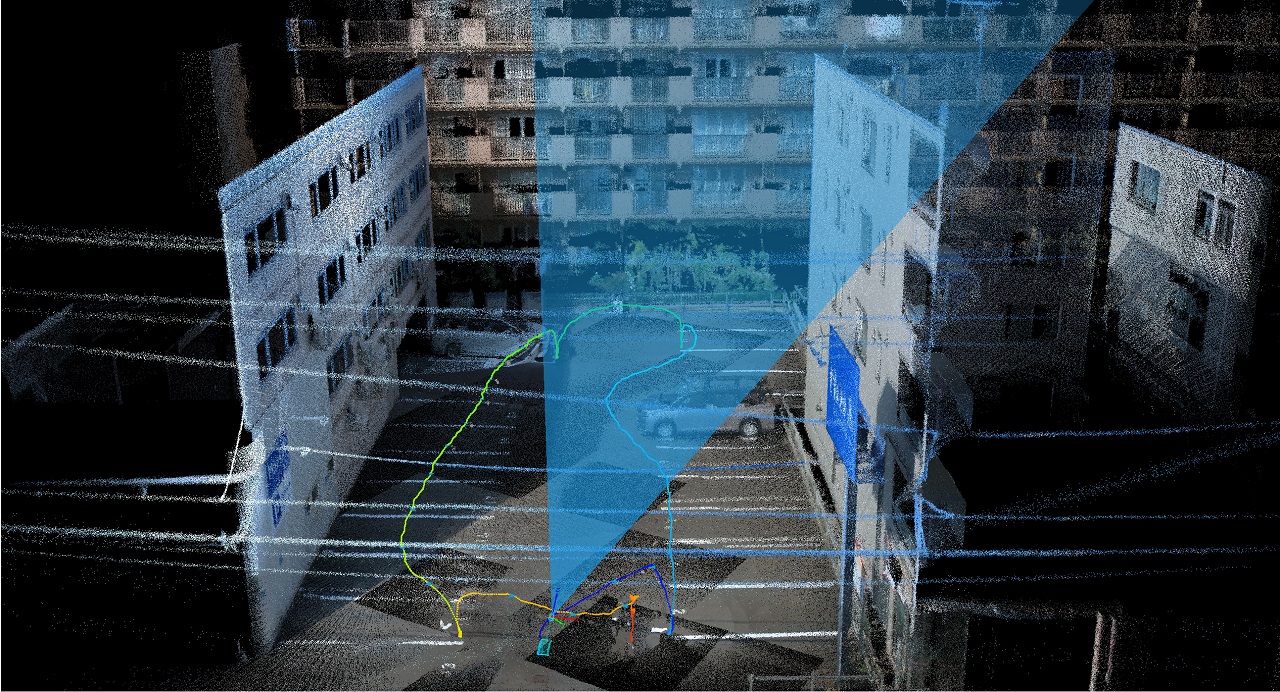
- 現場でのコース取りは重要であり、土砂の死角を防ぐために周囲と土砂の上の2重ループにしたが、後で反省すると今回の軌跡は余り良くない。大きく8の字コースにすべきだった。(SLAMは軌跡の守るべきガイドラインがあります)
- 今回、精度5cm以内に入るまでにトライ&エラーを繰り返したが、測定時と後処理時にそれぞれSLAM-LiDAR特有の現象による誤差ずれが発生し、それがわかるまでに時間を要した。Zenmuse L1などを使用した上空からの方法とは考え方を変える部分があります。
- 対空標識は十字型450mm□を使用したが、実際には外側余白が大きい600mm□以上を推奨。コースや歩き方は、事前に計画を立てる必要がある。
- メーカマニュアルだけですと、不明な所で作業がとまってしまい、精度を満たした成果が出るまで、2か月程度かかった。今までの質問事項なども踏まえ、リファレンスマニュアルなどをまとめる予定。
覚えてしまえば手軽に点群データとして測定出来ますので、SLAM方式のLiDARは、ドローンを飛行させることが難しい現場にて有用だと思います。
お時間があれば、以下もご確認ください。
Metashape 地上レーザスキャンと航空写真の処理 (kuu-satsu.com)
以上です。