LiDARの構造上発生する誤差要因に関してまとめるとともに、LiDAR360のもつ後処理の内容を解説します。(弊社リファレンスマニュアルからのご紹介)
ボアサイトキャリブレーション
ボアサイトとは、ボアは砲口、サイトは照準という意味のようですが、LiDARシステムにおいては、レーザ走査基準の座標系とIMU基準の座標系の軸を意味しており、これらが平行である必要があります。レーザ走査とIMUは、昔のは別々の組み合わせのものがありましたが、現在では一体となった製品が多いかと思います。この2つの軸は、理想的には完全に平行である必要がありますが、一体とはいえ実際には製品の製造量産ばらつき、使用される複合材料の熱膨張率の違いなどにより多少のずれが生じるため、そのずれ成分によって、下図のような成分のボアサイトエラーが発生します。
| ΔRollによる影響 | ΔPitchによる影響 | ΔHeadingによる影響 |
| 水平地盤が斜めになる。 | スキャン対象物の位置がスキャンラインに沿ってずれる。 | オブジェクトがシフトされ歪む。 |
LiDAR360のボアサイトキャリブレーションは、マニュアルあるいは自動アルゴリズムを使用し、幾何学的にボアサイトエラーを推定/較正します。
ストリップアラインメント
ストリップアラインメント(ストリップ調整とも言います)は、複数の隣接するLiDARフライトライン間(ストリップ間)のずれをアラインメント(位置合わせ)します。日本では、コース間調整ともいわれます。ボアサイトキャリブレーション後も点群が不一致な場合は、軌道エラーが原因で位置がずれている可能性があります。軌道エラーは、ストリップ間におけるIMU の姿勢と位置の誤差によって発生します。
ストリップアラインメントは、飛行高度、手動飛行、風、またはその他の環境などが原因で飛行軌道に微妙な影響を与え、点群が意図したとおりにアラインメントされないことがあります。そのため、LiDARの性能を踏まえ、規定された飛行を行う必要があります。手動で適当に飛行させたデータ、自動でもLiDAR性能範囲を超える点群データでは、正常な処理はされません。
LiDAR360は、軌道ファイルを読み込み、ストリップアラインメントのなかでボアサイトキャリブレーションの計算と補正を行う事が出来ます。DJI Zenmuse L1/L2システムは、軌道の時間は週と秒で管理されてますが、事前の処理にて点群データと軌道の時間を調整、整合性を取ります。
オーバラップのカット
レーザは射出後、拡散しながら進んでいきます。また、地面への入射角度が小さいと反射率も低くなります。これらの相互作用によりLiDARのFOV端部がもっとも精度が悪く、LiDAR直下がもっとも精度が良い特性を持っています。
![]()
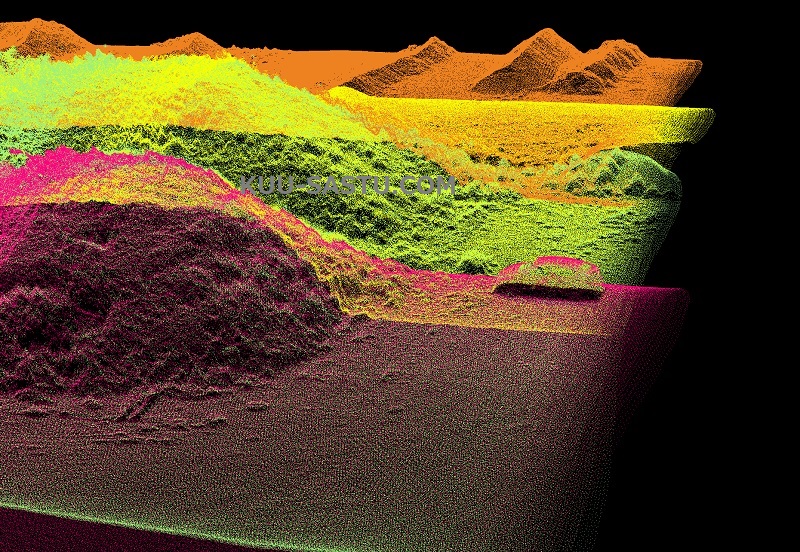
そのため、LiDARシステムで計測したストリップのオーバラップ部分は、精度の高いものと悪いものが混在している状況になります。LiDAR360では、最小限のFOVを指定し、各ストリップの理想的な点群のみをカット(不要なオーバラップは削除)し、それらをマージすることで高い精度の点群とすることが出来ます。この処理もストリップアラインメントの中で行われます。
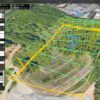
下図は、弊社のZenmuse L1を使用したLiDAR360によるストリップ解析です。
| 各軌道の重なり(全体) | 各軌道の重なり(詳細) |
| ストリップ調整前データ、各軌道のデータが複数重なっている。 | 右側中央の自動車は、赤、黄緑、黄色の3つ軌道の点群が重なっており、赤と黄色の点群は精度が悪いためストリップ調整にてカットされる。 |
このようにLiDARシステムは、様々な系統的な誤差を持っているため、後処理は必須のものとなりますが、ボアサイトキャリブレーションやストリップアラインメント、オーバラップカットは、一部の専門的なソフトウエアでのみでしか処理できません。
例えば、Zenmuse L1を使用している場合、基本的にはDJI Terraは生データをlasに変換しているのみとなります。LiDAR360で上記のような後処理をしなければ精度は出ないどころか、オブジェクトは2重、3重の点群データとなり、まともな点群データを得る事はできません。
以上です。