Metashape Professional 2.0.0 の主な違い
変更日: 2022年10月17日 (月) 午後7時5分
この記事では、フォーラムでダウンロードできる Agisoft Metashape のバージョン2.0 で導入された主な変更点について説明します。
フォーラム: https://www.agisoft.com/forum/index.php?topic=14904.0
Metashape 1.x から Metashape2.0 への更新は完全に無料です。
ライセンスを取得したユーザーからの追加の支払いは必要ありません。
Metashape Professional2.0 の主な違いには、レーザスキャンと航空 LIDAR データ サポートの新しい概念が含まれます。純粋な写真測量ワークフロー用にDEM 編集などのいくつかの新機能もあります。
・新しいライセンス認証システム
・GUI のいくつかのコマンドとの違い
・レーザスキャンと航空LiDAR データ
・深度画像のインポート
・DEM編集ツール
・ローカル軸を表示
注:バージョン2.0.0 で作成されたプロジェクト ファイルは、Metashape 1.8 以前のバージョンでは開くことができません。
新しいライセンス認証システム
Metashape2.0 には、新しいライセンス アクティベーションシステムが付属しています。 Metashape Professional2.0がマシンでアクティベートされる最初のバージョンである場合、このライセンスは、Metashape Professional 1.xバージョンと互換性のない新しいライセンス形式を使用するため、以前のバージョンには適していません。バージョン1.8 以前の上でインストールされバージョン2.0へのアップデートが有効化された場合、既存のライセンスファイルが使用されます。
フローティングライセンス版は、そのままMetashape2.0をご利用いただけます。
GUI のいくつかのコマンドとの違い
ワークスペースのインスタンス Camerasは、Imagesに名前が変更されます。
![]()
高密度クラウドはポイントクラウドと呼ばれるようになり、ワークフローメニュのコマンドはポイントクラウドの構築になりました。
![]()
レーザスキャンと航空 LiDAR データ
Metashape Professional2.0では、構造化地上レーザスキャンと非構造化航空レーザスキャンの両方を点群のインポート (「ファイル」 > 「インポート」 > 「ポイントのインポート」 を選択) コマンドを使用してインポートできます。構造化された情報を含むすべてのポイント属性がこのコマンドで保持されるようになりました。「ポイントのインポート」ダイアログで複数の点群が選択されている場合、それらすべてがプロジェクトにインポートされます。
インポートされたポイントクラウドは、ワークスペースとモデルビューに表示されます。
![]()
モデル ビューでは、ポイントクラウド周囲に2 つの領域が表示されます。 赤い色は、ポイントクラウドのバウンディングボックスを示します。
レーザスキャンデータがインポートされていることを指定するには、ポイントクラウドコンテキストニューから 「レーザスキャンとして使用」コマンドを選択します。
複数ある場合、各ポイントクラウドに対してこのアクションを実行します。
![]()
ポイントクラウドがレーザスキャンデータとして識別されると、Laser Scans フォルダーがワークスペースに表示されます。このフォルダには、レーザスキャンデータとして受信したすべての点群が含まれています。
![]()
(レーザスキャナでキャプチャされた) 深度マップ情報を含むポイントクラウドと球状のパノラマも、「ワークスペース」からアクセスできます。
![]()
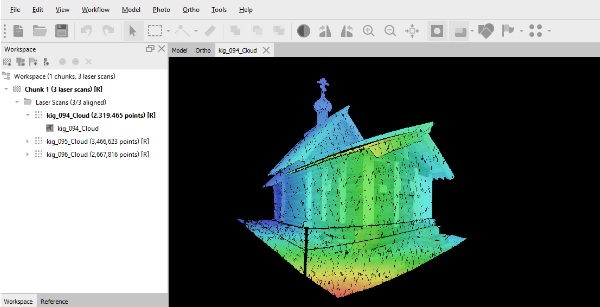
ポイントクラウドがレーザスキャンとして使用されるように割り当てられている場合は 「レーザスキャンデータの表示」ツールバーボタンを使用してモデルビューに表示できます。ソリッド、カラー、クラス、強度、立面、リターン値、スキャン角度、Source ID、信頼性 のさまざまなモードで表示できます。このコマンドは、ワークスペースのポイントクラウドコンテキストメニューからアクセスできます。表示中にスキャナの位置を表示するには、「カメラを表示」 ボタンを使用します。
![]()
複数のレーザスキャンを結合して結合されたポイントクラウドを構築できます。これを行うにはワークスペースで全てのレーザスキャンを選択し、コンテキストメニューから 「結合」 コマンドを選択します。結果のポイントクラウドがワークスペースに表示されます。
![]()
レーザスキャンをグループ化し、単一のグループとして固定することもできます (つまり、固定グループ化)。プロジェクトに複数の独立した LIDAR グループ (外部でアライメントされたデータを含む) がある場合、レーザスキャンデータをグループ化する必要があります。ワークスペースでレーザスキャンを選択し、「レーザスキャンの移動」 > 「新しいレーザスキャングループ”」を選択し、グループを右クリックして 「グループタイプの設定」 > 「固定」 を指定します。
![]()
レーザスキャンデータを相互に位置合わせするには、レーザスキャンのコンテキストメニューの 「レーザスキャンのアラインメント」 コマンドを使用します。
写真とレーザスキャンをアラインメントするには、「ワークフロー」 > 「写真のアライメント」 を選択し、ダイアログウィンドウで 「現在のアライメントをリセット」のチェックを有効にして実行します。
![]()
マーカは写真とレーザスキャンのアラインメントにも使用できます。バージョン2.0では、マーカはモデルビューで白いフラグとして表示されます。複数のレーザスキャンで同じマーカーの位置を指定すると、フラグが緑色になります。その他の場合 (つまり、マーカの位置が写真上でのみ指定されている場合) ではフラグは白のままです。
![]()
深度画像のインポート
深度画像のインポート (「ファイル」 > 「インポート」 > 「深度画像のインポート」) コマンドは、TOF 深度センサーまたは同様のデバイスを搭載したスマートフォンからの RGBD 画像を読み込む事を目的としています。Metashape は引き続き PTX および E57 インポート形式をサポートしますが、そのようなワークフローは Metashape2.0では最適とは見なされません。バージョン 1.8 では、次の記事で説明されているアルゴリズムを使用してください: 深度センサーを備えたスマートフォンカメラからのデータ処理
DEM 編集ツール
Metashape Professional2.0 から、DEM編集ツールが新しく利用可能になりました。DEM編集ツールはサーフェスに適用され、たとえば屋根のエッジを編集したり、穴のある領域 (水、森など) に平坦なサーフェスを追加したりできます。詳細なワークフローについては、次の記事を参照してください: DEM 編集ツール
![]()
ローカル軸を表示
バージョン2.0 以降の Metashape では、ビュー操作中に各カメラの軸の方向を表示できます。ツールバーで 「カメラを表示」 > 「ローカル軸を表示」 を選択します
![]()
以上です。

