前回、MATRICE300 RTK + Zenmuse P1の測量精度検証(第1回目)を報告しましたが、今回は、全く同じ条件でPhantom4 RTKとの比較をまとめました。ご参考になれば幸いです。
撮影条件
前回報告と同様、同じ日に1時間程度の違いで撮影しております。
| 項目 | 条件 |
| 測量面積 | 約2.85ha(244m×117m) |
| 地上解像度 | 1.0 pix/cm @ 高度80m OL80% SL60% |
| 天候 | 薄曇り、風速6m前後(業務であれば通常は飛行をしない程度の風) |
| RTK | ネットワークRTK(リアルタイム補正) *弊社ジオイドモデルにてMetashape上にて楕円体高から標高へ変換。 |
カメラの設定
Phantom4 RTKは、シャッタースピード優先で、Zenmuse P1と同じシャッタースピードとしました。Phantom4RTKの場合、絞りをMatrice300 RTKと同条件(f11)にするとISOがあがりノイズが発生する可能性があります。センサーが小さく被写界深度も深いのでシャッタースピード優先にて撮影しています。
| 項目 | Zenmuse P1 | Phantom 4RTK |
| カメラ仕様 | ・センササイズ:35.9×24 mm ・有効画素45MP ・35mm/F2.8 |
・センササイズ 1インチCMOS ・ 有効画素20MP ・24 mm(フルサイズ換算)/F2.8 |
| 設定 | マニュアル設定にて ・シャッタースピード:1/1000秒 ・絞りF11 ・ISOオート |
シャッタースピード優先 ・シャッタースピード:1/1000秒 ・絞り(オート) F3.2~F4.0 ・ISO 100 |
| フォーカス | マニュアルフォーカス:∞ (事前に無限大キャリブレーション実施が必用) |
オートフォーカス |
| ひずみ校正 | – | ON |
標定点・検証点
標定、検証点ともに同条件です。
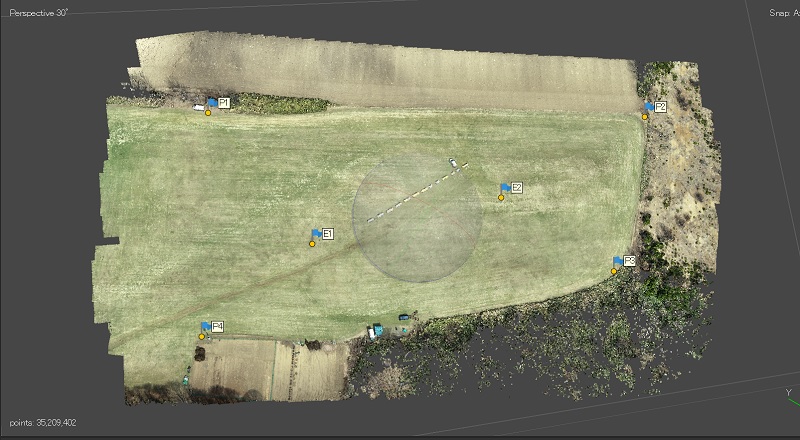
標定点P1~P4、検証点E1~E2を設定し、標定点の有無で検証点精度がどのように変化するかを確認。P1とP2間は240mありますので、i-con基準では厳密にはもう2つ間に標定点を設置すべきですが、RTKの検証なので周囲4点のみとしています。
*標定点、検証点の座標は、GNSS RTKで計測。
| Phantom4 RTKでの高密度点群 |
| Zenmuse P1での高密度点群 |
精度
以下の各条件にて、検証点の精度の比較になります。
- P1~P4を標定点として指定したケース
- P1~P2のみを標定点として指定(災害時を想定)したケース
Zenmuse P1とP4Rとの精度比較は、下表になります。比較は、検証点のRMS誤差(m)です。やはり、P4RよりもP1が勝っています。写真測量の誤差の主な要因は、レンズの歪であるため、レンズが良いほど誤差も少なくなります。当然ながら広角による誤差も含まれるため、50mmのレンズを使用してみたいところです。
| 標定点 | Zenmuse P1 | P4R |
| P1~P4 | 0.027362 | 0.037280 |
| P1~P2 | 0.028203 | 0.039465 |
素の結果を示すため、Metashapeの結果(P4R)の画面を貼り付けます。M300Rのは、前回の記事を参照ください。
P4R P1~P4を標定点として指定したケース
![]()
P4R P1~P2のみを標定点として指定(災害時を想定)したケース
![]()
最後に
今回掲載しました結果に関しましては、あくまでも一例であることをご了承ください。
1回目でも記載しましたが、誤差に関しては、GCPや検証点の座標測定はGNSS(RTK)で測定しており、基準点からの距離により理論上1.9cm程度の誤差が発生しています。それを考慮すると妥当な所だと思います。
以上です。

