標高及び水平の調整用基準点における座標計測の方法について最新の状況をまとめてみました。レーザスキャナー(Zenmuse L1)の性能・測量精度・ノウハウ 第2回の続きの話になります。
最初におさらいをします。
UAV搭載型レーザスキャナを用いた公共測量マニュアル(案)(令和2 年3 月改正)Page 41 <第46条 運用基準> より抜粋
| (1)標高の均一度の検証 |
| (1) 標高の均一度の検証 ① 調整点を中心に、標準的な要求点間距離の5倍の直径の円又は5倍の辺長の正方形を設定し、当該範囲内に存在する各点の標高値について調整点の標高値との較差を求め、較差の絶対値の最大値、較差の平均値、標準偏差を求める。 (2) 標高の正確度の検証 ① 調整点を中心に、標準的な要求点間距離の5倍の直径の円又は5倍の辺長の正方形を設定し、当該範囲内に存在する各点の標高値の平均値を求める。 ② 全ての調整点において、①で求めた標高値の平均値と調整点の標高値との較差を求め、その平均値と標準偏差を求める。 |
| (2)水平位置の検証 |
| ① 対空標識を計測した点群から調整点の位置座標を求め、調整点の位置座標との較差を求める。 ② 全ての調整点を対象に較差の平均値と標準偏差を求める。 |
そして当時、実際の精度確認において、i-constructionのルールや検証に使用したソフトの仕様にいくつか疑問があり、ベンダー様にソフトの仕様を確認後、国総研様に精度確認方法の詳細を確認しました。国総研様から以下の回答を得ました。
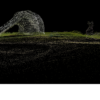
水平調整用に関しては、(*1)RGB表示が可能なレーザスキャナーにおいて、中心を特定できる場合は、下記の図のような「補助線」を作成し、ターゲットの中心座標(X,Y,Z)を求めて精度検証を実施してください。下記の図は、あくまで例であり、真値を測った位置が分かるように作成してください。設置した対空標識は600mm×600mmとあらかじめ大きさがわかっているため、例として下図のような補助線で明確にします。
![]()
(*1)当時、水平位置に関しては、標識上の中心はプリズムを使用して測定することから、点群での真値計測に置いても、上記記述の様にRGB表示が前提でした。UAV搭載型レーザスキャナを用いた公共測量マニュアル(案)(令和2 年3 月改正)では、反射強度を利用した水平位置特定を可としています。
標高調整用に関しては、(標識上の)点群データの平均標高を計算する必要があります。理由は、レーザパルスは、放射した瞬間から広がりながら進んでいく特性があるため、標高調整用基準点に到達した際に、高さ(Z座標)への影響が生じるためです。
![]()
LiDAR360を使用した補助線機能
まずは、XY座標を測定します。
LiDAR360では、ベクターエディット機能を使い、ラインを描き、そのクロスポイントの座標を取得することが出来ます。但し、現在のバージョンでは、レクタングルを描く時にサイズ指定は出来ないので、輪郭が見える範囲で補助線を引き、その後クロスラインを引いてみました。図の赤枠は、そのクロスポイントの座標になります。
サポート専用ページです。