#PPK Go 実践解説書を更新しました。(2023.06.27)
1 PPK Go概要
PPK Go実践解説書では、弊社が実際に検証し、マニュアルには記載されていないノウハウをまとめた内容になります。
1-1 PPK Goの主な機能
PPK Goは、UAVで観測したカメラ座標(JPEG XMPタグ内の経緯度座標)を電子基準点のデータを元に後処理補正をします。また、後処理と合わせて、国土地理院のジオイドモデルを使用する事で、楕円高から標高に変換します。この変換は、補正された座標に対する楕円体高を標高に変換します。
後処理補正後のデータは、カメラ座標に書き込み、もしくは、テキストでエクスポートをする事ができます。MetashapeやPix4Dなどの点群ソフトでは、これらをインポートすることが出来ます。
1-2 対応ドローン
後処理補正には、PPKRAW.bin(以下binファイルと記す)を生成する機種が必用です。それ以外のRTKを装備していない機体のデータは、使用出来ません。binファイルは手動フライトでは生成されませんので、各機体の専用アプリにてミッション(自動)飛行を使用してください。
- Phantom4 RTK
- Zenmuse P1
- Autel社EVO II(*1)
- Mavic3 Enterprise(*1)
*1 電子基準点データの手動ダウンロードのみ、もしくは自動ダウンロードするための準備としてバイナリーデータからRinexの再生成が必要です。手動ダウンロードは、観測後概ね1~2時間ほどでダウンロード可能ですのでこの方法を推奨します。
….
PPK Go実践解説書は、上記に加えて以下の内容をまとめています。
1-1 PPK Goの主な機能
1-2 PPK Go対応ドローン
1-3 後処理補正方法
1-4 前提
1-5 国土地理院アカウント登録
2 メニューの日本語化
3 プロジェクトの作成
4 座標系の設定
5 データインポート
5-1 UAVデータのインポート
5-2 電子基準点データのインポート
5-2-1 FTPによる自動ダウンロードを使用する場合
5-2-2 マニュアルによるダウンロードを使用する場合
6 基準局の設定(マニュアルダウンロードのみ)に関して
6-1 基準点の成果座標の確認
6-2 基準局の設定
7 移動局(UAVデータ)の設定
8 処理
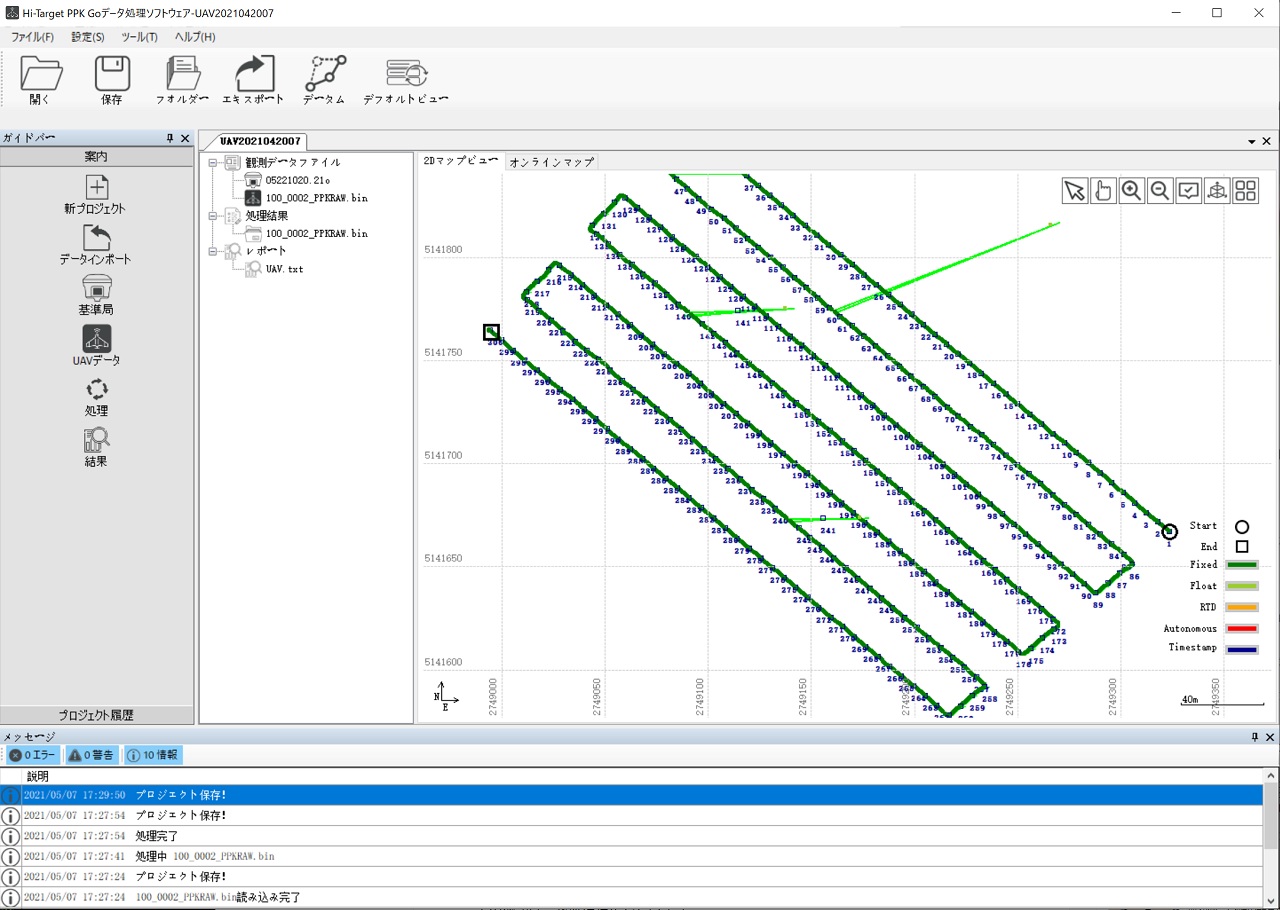
8-1 解析結果の確認
8-2 解析結果のエクスポート
8-3 テキスト形式のレポート
8-4 JPEG XMPジオタグ付け
8-5 エクスポートしたテキストデータをMetashape等に取込む
9 APPENDIX
![]()
以上です。

